Virage à puissance constante
Palier – Montée – Descente
Remarque préalable: on considère ici « puissance constante » comme étant « traction moteur constante ».
Rappel: angles caractéristiques
Les différents angles sont définis sur la figure 1 ci-dessous. La relation entre ceux-ci est identique dans le cas d’un vol en palier, en montée ou en descente.
Υ : pente = angle entre la direction du déplacement et l’horizontale Θ : assiette = angle que fait l’axe du fuselage avec l’horizontale
κ : calage de l’aile = angle entre la corde de profil et l’axe du fuselage α : incidence = angle entre la corde de profil de l’aile et la trajectoire
Vol en montée
Les angles d’assiette et de pente sont positifs
Vol en palier
En général, l’angle de calage de l’aile est fixé de telle façon que l’axe du fuselage est, à la vitesse de croisière, sensiblement horizontal et donc aligné avec la trajectoire, ce qui, en plus de l’aspect confort à bord, minimise la traînée.
L’angle de pente est nul.
L’angle d’assiette est voisin de 0.
Vol en descente
L’angle de pente est négatif.
Sauf cas particulier de pente très faible et/ou de vitesse faible (angle d’incidence fort), l’angle d’assiette est négatif.
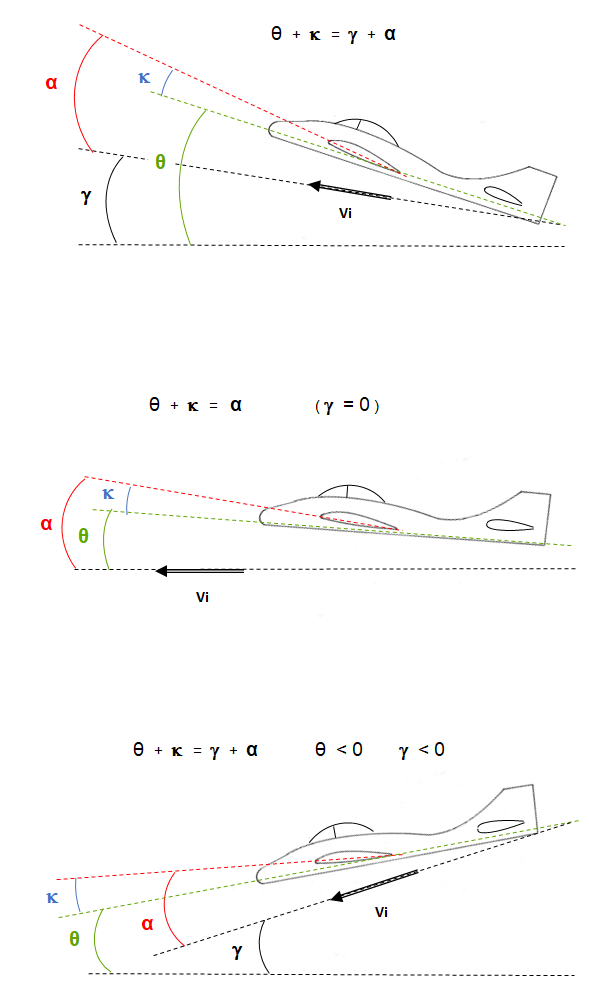
Quelque soit la trajectoire, on obtient la relation : Assiette + Calage = Pente + Incidence
Note : Simplification
Dans le cas de la formation initiale, il est de coutume « d’oublier » l’angle de calage et de considérer que c’est l’axe de la corde de profil qui définit l’assiette. On présente alors la relation suivante:
Assiette = Pente + Incidence
Direction de la force de traction du groupe motopropulseur – approximation
De façon générale, la direction de la force de traction (Tm) est sensiblement alignée avec celle de l’axe du fuselage. Lors de la présentation de l’équilibre des forces agissant sur l’avion, il est de coutume d’assimiler la direction de cette traction moteur à celle de la trajectoire, ce qui constitue une approximation.
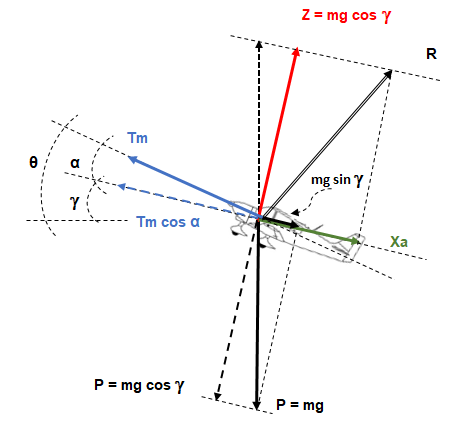
La figure 2 représente l’équilibre des forces sur une trajectoire de montée. La valeur de la composante de Tm sur la trajectoire, à laquelle s’oppose la traînée aérodynamique (Xa) associée à la composante du poids sur la trajectoire (mgcosΥ) est Tm cos α.
α étant faible, on suppose : Tm ≈ Tm cos α
(On néglige ici l’angle de calage de l’aile).
Influence de la mise en virage sur la trajectoire
A inclinaison nulle, vitesse constante, et sur une trajectoire rectiligne quelle qu’elle soit (palier, montée, descente), l’équilibre des forces sur l’axe perpendiculaire à la trajectoire est décrit de façon générale par la relation suivante:
Z = mg cosΥ avec:
Z : portance mg: poids de l’appareil Υ : pente de la trajectoire
Dans le cas de vol en palier, Υ = 0, donc Z = mg Dans le cas de la montée ou de la descente, Υ ≠ 0
Les différents schémas d’équilibre des forces sont présentés ICI
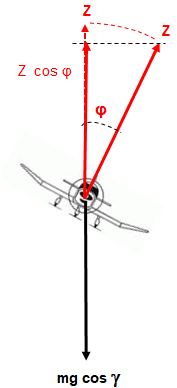
A la mise en virage, il s’ensuit une inclinaison de l’axe de la portance Z ( φ = angle d’inclinaison).
La projection de Z sur l’axe perpendiculaire à la trajectoire devient donc Z cos φ, qui se trouve par conséquent inférieure à mg cosΥ. L’équilibre initial des forces étant rompu, l’angle de trajectoire, initialement Υ, ne peut être maintenu et se met à diminuer.
Voir figure 3 ci-contre.
Afin de maintenir une nouvelle trajectoire constante, il faut donc procéder à une augmentation de la portance (Z2) par augmentation de l’incidence, afin de retrouver l’équilibre: Z2 cos φ = mg cosΥ.
Cet accroissement de l’incidence induit une augmentation du coefficient de traînée (Cx), et donc de la trainée aérodynamique (Xa) et par conséquent, dans certains cas, une baisse de la vitesse sur trajectoire, si la traction moteur reste constante.
Virage en palier
Le maintien d’une altitude constante lors de l’exécution d’un virage en palier nécessite d’augmenter l’incidence, et donc la portance, afin que la composante de celle-ci sur l’axe verticale continue d’égaler le poids de l’appareil. Comme indiqué plus haut, li s’ensuit une augmentation de la traînée aérodynamique.
➔ L’avion décélère jusqu’à une vitesse pour laquelle la traînée aérodynamique reste égale à la traction moteur.
Evaluation théorique de la vitesse en fonction de l’inclinaison
Rappels (voir ICI)
En vol à inclinaison nulle à vitesse initiale V1:
- coefficient de portance: Cz1 = 2 . m. g / ρ . V12 . S
- traînée: X1 = ½ . ρ . V12 . S . (Cxp + Cxi) = ½ . ρ . V12 . S . (Cxp + Cz12 /π . ƛ . e )
Méthode simplifiée de détermination de la vitesse (V2) pendant le virage
Lors du virage, le facteur de charge consécutif à l’inclinaison a pour valeur Fc = 1 / cos(φ)
- On détermine Cz1 et X1 à inclinaison nulle
- Pour une inclinaison φ ,le nouveau coefficient de portance correspondant à la nouvelle incidence est Cz2 ≈ Cz1 . Fc
- La trainée, constante, est alors: X2 = ½ . ρ . V22 . S . (Cxp + Cz22 /π . ƛ . e )
On cherche alors la valeur de V2 telle que X2 = X1
Exemple: virage en DR 400 / 120
Données:
M = 900 kg, ρ = 1.225 kg/m3, S = 13.6 m2, ƛ = 5.35, e = 0.7, Cxp = 0.035, Vs (φ=0) = 94 km/h
Le graphique ci-dessous présente l’évolution de la vitesse pour différentes inclinaisons. Plusieurs vitesse initiales avant inclinaison sont indiquées.
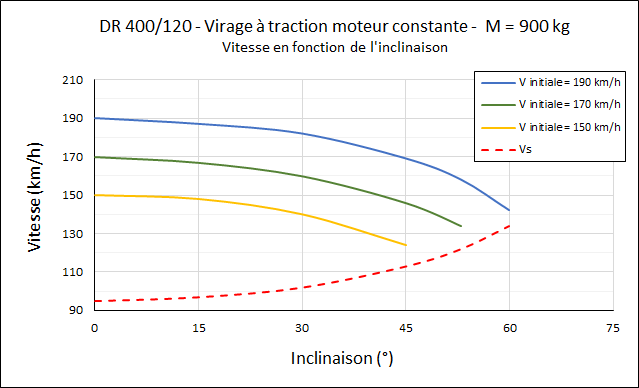
Pour la courbe montrant l’augmentation de la vitesse de décrochage : Vs (φ) = 94 . (1/cosφ)1/2
Remarque: dans le cas où l’on désire maintenir la vitesse constante, il faut alors augmenter la traction Tm par une augmentation de la puissance moteur.
Virage en montée
Remarque préalable: pour les appareils de faible puissance moteur, équipés d’hélice à calage fixe, tels que présents à majorité dans les aéro-clubs, la montée « à traction moteur constante » est une montée à puissance moteur maximum.
A l’inverse du vol en palier, la force de trainée s’opposant à la traction moteur n’est pas uniquement la traînée « aérodynamique » Xa mais inclut également la composante du poids sur la trajectoire, cette dernière étant d’autant plus forte que l’angle de pente (Υ) est important.
Voir figure 2 ci-dessus.
L’équilibre des forces sur la trajectoire est par conséquent : Tm = Xa + mg sinΥ avec Xa = ½ . ρ . V2 . S . Cx
(Cx est coefficient de traînée globale: Cx = Cxp + Cxi).
Avant la mise en virage, et pour une vitesse V1, et une pente Υ1, l’équation d’équilibre est : Tm = ½ . ρ . V12 . S . Cx1 + mg sinΥ1
Après la mise en virage, et comme indiqué plus haut, l’augmentation de l’incidence nécessaire à l’augmentation de la portance entraine un accroissement du Cx, celui-ci devenant Cx2 > Cx1
2 cas se présentent alors:
1. Soit la pente est maintenue constante:
➔ l’équation d’équilibre est alors: Tm = ½ . ρ . V22 . S . Cx2 + mg sinΥ1
Tm restant constant, ainsi que la pente, et par conséquent mg sinΥ1 , il s’ensuit une diminution de vitesse V2 < V1 consécutive à l’augmentation du Cx.
2. Soit la vitesse de montée doit être maintenue constante:
➔ l’équation d’équilibre devient Tm = ½ . ρ . V12 . S . Cx2 + mg sinΥ2
Tm restant constant, l’augmentation de la trainée aérodynamique consécutive au maintien de la vitesse alors que le Cx augmente, doit se traduire par une diminution de la composant du poids sur la trajectoire, mg sinΥ1 devenant mg sinΥ2, donc Υ2 < Υ1.
Ce maintien de la vitesse en virage en montée est donc obtenu par une diminution de l’assiette (action à piquer). Cette diminution de la pente, la vitesse sur trajectoire restant constante, entraîne donc une baisse de la vitesse verticale (Vz). Rappel : sin Υ = Vz / Vi.
Cette diminution de la pente est d’autant plus accentuée que l’inclinaison du virage est importante.
➔ La vitesse de montée étant déjà faible, son maintien est important et on comprend que l’inclinaison en virage doit être faible à modérée pour éviter une trop forte dégradation de la pente. En règle générale, il est recommandé de ne pas dépasser 20 – 25 °.
Exemple: virage en DR 400 / 120
1. Evaluation théorique à partir des données du manuel de vol pour un avion équipé d’une hélice 54″
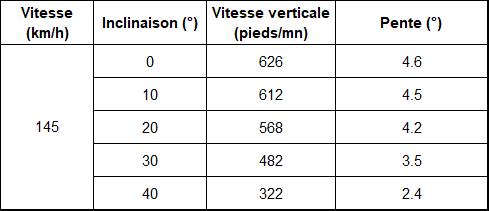
Puissance maximum, vitesse de meilleur taux de montée (Vz max) : 145 km/h, assurant une vitesse verticale de 626 pieds/mn.
Données:
M = 900 kg, ρ = 1.225 kg/m3, S = 13.6 m2, ƛ = 5.35, e = 0.7, Cxp = 0.035
Le tableau ci-contre présente la vitesse verticale et la pente de montée calculées pour différentes valeurs de l’inclinaison pendant le virage.
Note: la traction moteur calculée est de 1660 N.
2. Mesures en vol
Mesures effectuées dans les conditions suivantes:
M = 850 kg, QNH = 1014 hPa, Altitude moyenne de vol = 1500 pieds, Température = 12°C à 1500′
Vitesse : 140 km/h
| Inclinaison (°) | Vz (pieds /mn) |
| 0 | 650 |
| 20 | 550 |
| 30 | 450 |
| 45 | 250 |
Virage en descente
A l’inverse du vol en palier et du vol en montée, la force de traînée s’oppose à la traction moteur à laquelle s’ajoute la composante du poids sur la trajectoire, cette dernière étant d’autant plus forte que l’angle de pente (Υ) est important.
L’équilibre des forces sur la trajectoire est par conséquent : Tm + mg sinΥ = Xa avec Xa = ½ . ρ . V2 . S . Cx
Avant la mise en virage, et pour une vitesse V1, et une pente Υ1, l’équation d’équilibre est : Tm + mg sinΥ1 = ½ . ρ . V12 . S . Cx1
Après la mise en virage, et comme indiqué plus haut, l’augmentation de l’incidence nécessaire à l’augmentation de la portance entraine un accroissement du Cx, celui-ci devenant Cx2 > Cx1
A l’image du vol en montée, 2 cas se présentent alors:
1. Soit la pente est maintenue constante:
➔ l’équation d’équilibre est alors: Tm + mg sinΥ1 = ½ . ρ . V22 . S . Cx2
Tm restant constant, ainsi que la pente, et par conséquent mg sinΥ1 , il s’ensuit une diminution de vitesse V2 < V1 consécutive à l’augmentation du Cx.
2. Soit la vitesse de descente est maintenue constante:
➔ l’équation d’équilibre devient Tm + mg sinΥ2 = ½ . ρ . V12 . S . Cx2
Tm restant constant, l’augmentation de la trainée aérodynamique consécutive au maintien de la vitesse, alors que le Cx augmente, doit se traduire par une augmentation de la composant du poids sur la trajectoire, mg sinΥ1 devenant mg sinΥ2, donc Υ2 > Υ1.
Ce maintien de la vitesse en virage en descente induit un accroissement de la pente qui, puisque la vitesse sur trajectoire reste constante, entraîne donc une augmentation de la vitesse verticale (Vz).
Cette augmentation de la vitesse verticale est d’autant plus accentuée que l’inclinaison du virage est importante.
Remarque: dans le cas où l’on désire maintenir la vitesse sur trajectoire et la vitesse verticale constantes (c’est à dire mg sinΥ = constante), il faut alors augmenter la traction Tm par une augmentation de la puissance du moteur.
Exemple: virage en DR 400 / 120
Evaluation théorique
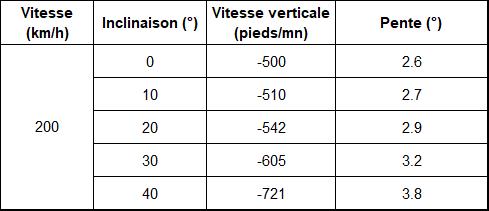
Vitesse de descente : 200 km/h, vitesse verticale à inclinaison nulle : – 500 pieds/mn.
M = 900 kg, ρ = 1.225 kg/m3
Le tableau ci-contre présente la vitesse verticale et la pente de descente calculées pour différentes valeurs de l’inclinaison pendant le virage.
En résumé
Lors de la mise en virage, à traction moteur constante, les conséquences sur la pente de trajectoire et/ou la vitesse peuvent être synthétisées comme suit:
| Trajectoire | Equation d’équilibre | Pente (Υ) | Impact sur la pente si Vi constante | Impact sur la vitesse si Υ constante | Remarques |
| Palier | Tm = Xa | Υ = 0 | Impossibilité de maintenir le palier | Vi diminue | Pour maintenir Υ = 0 et Vi = constante, nécessité d’augmenter Tm |
| Montée (En général P max) | Tm = Xa + mg sinΥ | Υ > 0 | Pente de montée, et donc Vz, plus faibles | Vi diminue | Pas de possibilité d’augmenter Tm (montée à puissance maximum) |
| Descente | Tm + mg sinΥ = Xa | Υ < 0 | Pente de descente, et donc Vz, plus fortes | Vi diminue | Pour maintenir Vz = constante si Vi = constante, nécessité d’augmenter Tm |