Equilibre des forces
Les schémas d’équilibre des forces agissant sur l’avion en fonction de la trajectoire (palier, montée, descente, virage) sont présentés ci-après. Ils sont montrés dès les premières pages des manuels de formation au pilotage. On se rappellera les conditions de ces schémas:
- Dans une majorité de ces schémas, les différentes forces sont ramenées au centre de gravité de l’avion (CG), là où s’applique son poids (P). En particulier la portance (Z) indiquée est la résultante au CG de l’ensemble des forces de portance (de l’aile, du stabilisateur, du fuselage). Idem pour la force de traînée qui est la résultante au CG des forces individuelles de traînée générées par chaque composant de l’avion.
- Les conditions d’équilibre des forces présentées, telles que Tm = X ou Z = P (dans le cas du palier), ne sont valables que sur des trajectoires rectilignes à vitesse constante. La somme de toutes les forces extérieures s’appliquant sur l’avion (poids, traction moteur, résultante aérodynamique*) est alors nulle, ainsi que l’accélération subie par l’avion. Lors d’un changement de trajectoire dans le plan horizontal (virage) ou vertical (mise en palier/descente/montée, ressource), il y a déséquilibre du système et la somme de ces forces n’est plus nulle, à l’image de l’accélération subie par l’appareil.
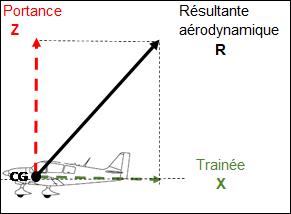
(*) Rappel : la résultante des forces aérodynamiques (R), est la conséquences de l’action de l’air sur l’avion (en raison de sa masse volumique et de sa viscosité). Il est de coutume de la décomposer en 2 forces, l’une sur la trajectoire, l’autre sur un axe perpendiculaire à la trajectoire
- trainée aérodynamique (X) : composante de R sur la trajectoire
- portance (Z) = composante de R sur l’axe perpendiculaire à la trajectoire
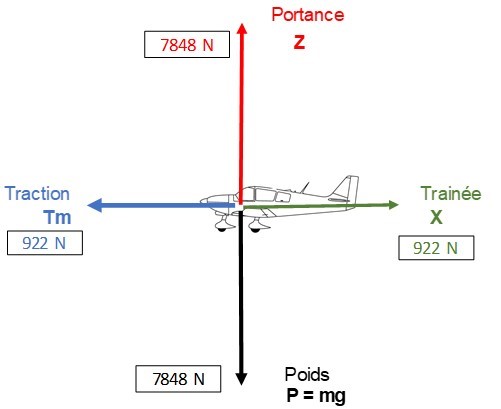
Dans le cas du vol en palier (figure 1), Z est verticale.
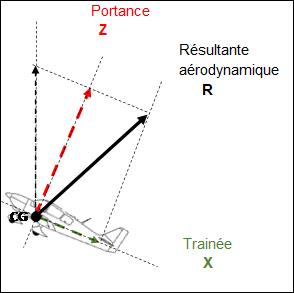
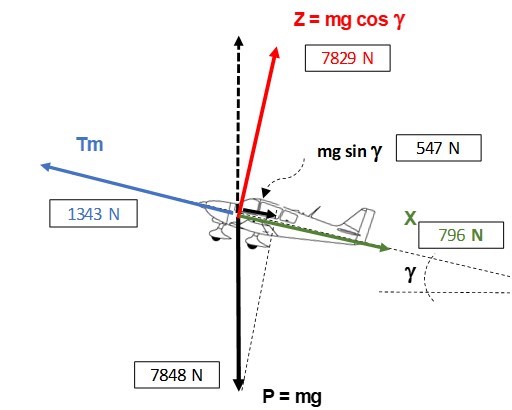
Dans le cas de du vol en descente ou en montée (figure 2) Z n’est n’est plus verticale et est inférieure à la composante de R sur l’axe vertical (cette dernière équilibre le poids).
Remarque: dans cet exemple de vol en montée, X est la traînée aérodynamique, donc due à la vitesse.
Comme présenté plus bas, une autre force de traînée vient s’ajouter, à savoir la composante du poids sur la trajectoire, d’autant plus forte que la pente augmente.
Afin de concrétiser les différents schémas, on indique les valeurs que prennent ces forces pour le cas d’un DR 400 avec les données suivantes:
Masse : 800 kg, conditions standards, Zp = 0.
Note: ces valeurs sont le résultat de calculs théoriques, et la précision indiquée à 1 N près (…) a pour seul but de présenter une cohérence dans les résultats du calcul entre les différentes forces. Seul est à retenir l’ordre de grandeur de celles-ci.
Vol en palier
Vitesse : 190 km / h (= 52.8 m/s)
Portance (Z) = Poids (P) = m.g = 800 x 9.81 = 7848 N
Traînée (X) due à la vitesse = 922 N
Traction moteur (Tm) = Traînée = 922 N
Note : puissance développée par le moteur (avec rendement hélice = 0.75 à 190 km/h):
P = 922 x 52.8 / 0.75 = 64908 watts soit 88 cv
Vol sur trajectoire montante
Vitesse : 150 km / h , Vz = 600 pieds / mn,
→ Le plan de montée (γ) est de l’ordre de 4°.
→ Z = m.g.cos (γ) = 7829 N, ce qui est très légèrement inférieur au poids
Traînée totale = traînée due à la vitesse (X) + composante du poids sur la trajectoire m.g.sin(γ)
Traction moteur (Tm) = Traînée totale = 796 + 547 = 1343 N
Puissance développée par le moteur : 101 cv
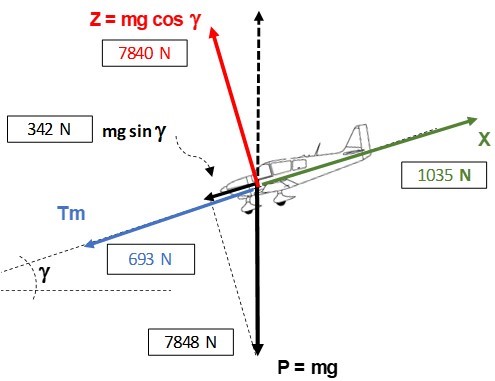
Vol sur trajectoire descendante
Vitesse : 210 km / h , Vz = – 500 pieds / mn
→ Le plan de descente (γ) est de l’ordre de 2.5°.
Comme précédemment, la portance est très lègèrement inférieure au poids
Z = m.g.cos (γ) = 7840 N,
Traînée due à la vitesse (X) = 1035 N
→ Traction moteur (Tm) = 1035 – m.g.sin(γ) = 1035 – 342 = 693 N
Puissance développée par le moteur : 69 cv
Vol moteur réduit à finesse maximum
Vitesse : 130 km / h , Vz ≈ – 700 pieds / mn
→ Le plan de descente (γ) est de l’ordre de 5.7° (finesse ≈ 10).
La seule traction consiste en la composante du poids sur la trajectoire (traction hélice nulle).
Traînée due à la vitesse (X) = m.g.sin(γ) = 780 N

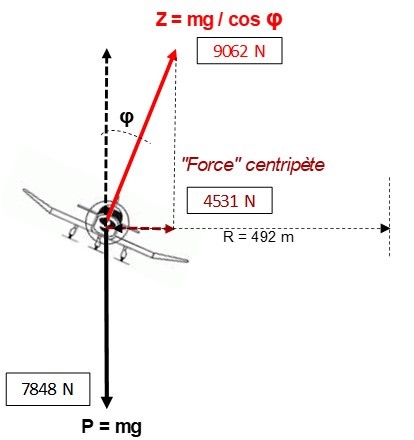
Virage en palier
Vitesse : 190 km / h , inclinaison : φ = 30°
L’incidence de vol doit être augmentée pour générer une portance de 9062 N afin de maintenir le vol en palier. Sa composante sur l’axe vertical équilibre alors le poids. Sa composante sur l’axe horizontale, soit m.g.tg(φ) = 4531 N, assure la déviation de la trajectoire.
Facteur de charge : Fc = Z / P = 1.15
Rayon de virage : R = V2 / g.tgφ ≈ 492 m
Vitesse angulaire : ω = V / R ≈ 0.107 rad / s ou 368 ° / mn
Accélération centripète : Γ = ω2 . R ≈ 5.66 m / s2
(de façon plus rapide, c’est aussi Γ = g.tgφ = 5.664 m/s2)
L’effet centripète de déviation (« force ») a pour valeur: m x Γ = 4531 N